The usual example is for the position of a space ship. You have the position/velocity of the ship and also an independent sensor of those. Both of those are somewhat iffy (usually assumed for continuous variables to be Gaussian). Using these two iffy things together, you can get a much more accurate approximation (smaller variance than both) of the current position/velocity.
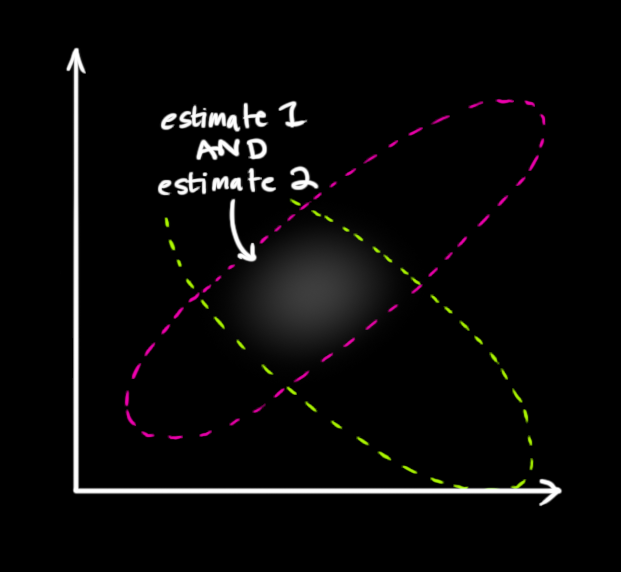 |
| from bzarg |
The other ingredient of the method that makes it get called a Kalman filter is the the change in the sensed data is expected to be linear, so that all of this can be modeled using simple repeated matrix operations.
Of course, this is not limited to dynamic mechanics but it makes the best presentation (because of the linear equations
The point here (which is not to explain Kalman filters) is that the computational method of correction (abstracting away the matrices) is one of a one step recurrence relation (new sensor data at each step too) which is essentially dynamic programming and even better, you only need to know the most recent item.
No comments:
Post a Comment